In simple terms, understand the reducer, the core component of industrial robot
The reducer, the core component of industrial robot, is the core of mechanical transmission. The speed and accuracy of robot are related to the reducer. The reducer used by industrial robot mainly includes harmonic reducer and RV Reducer.
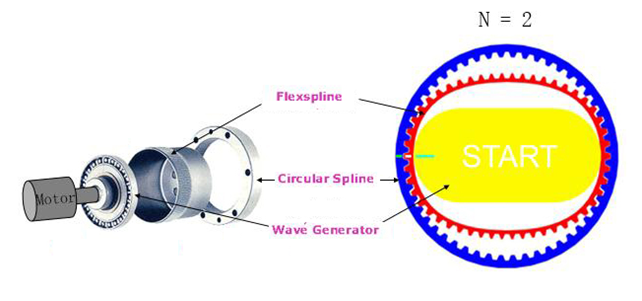
1、 Harmonic reducer
1. The motor shaft is connected to the wave generator, and the manipulator is connected to the hard base of the flexible gear ring
2. The flexible gear ring has n gear positions less than the rigid gear ring
3. The wave generator rotates once, and the flexible gear ring moves n gear positions
4. High deceleration ratio can be achieved.
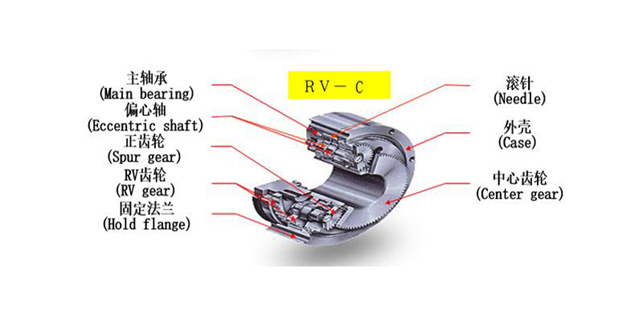
2、 RV Reducer
2.1 RV Reducer structure
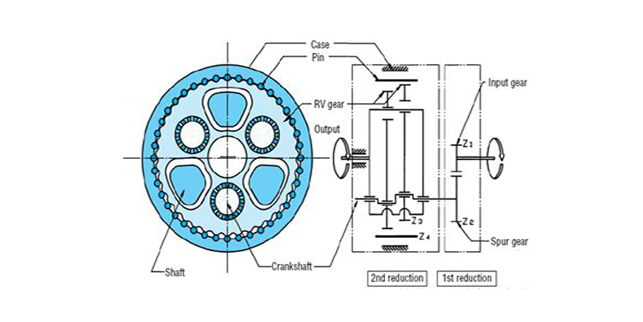
Rv-e is a two-stage reduction gear. The first stage reduction is the external meshing of the input gear and spur gear, and the three spur gears are symmetrical to the output shaft at an interval of 120 °. The second stage reduction drives the eccentric shaft through the spur gear, drives the RV gear installed on the eccentric shaft, and causes the eccentric movement of the two RV gears. The two RV gears drive the output shaft with a 180 ° phase difference to provide a balanced load.

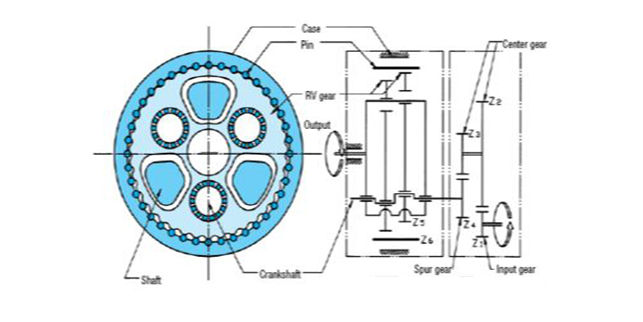
The first and second reduction gears mesh with the outer spur gears of rv-c, and then the first and second reduction gears. The three spur gears are symmetrical to the output shaft at 120 ° intervals.
The second stage reduction drives the eccentric shaft through the spur gear, drives the RV gear installed on the eccentric shaft, and causes the eccentric movement of the two RV gears. The two RV gears drive the output shaft with a 180 ° phase difference to provide a balanced load.
2.2 deceleration principle of RV.
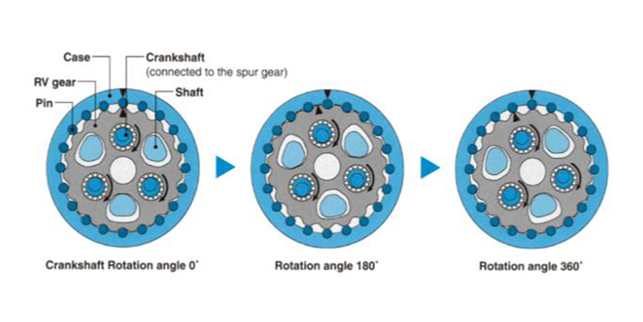
A cylindrical needle roller is installed in the inner ring of the shell. The eccentric movement of the RV gear causes the engagement and disengagement of the needle roller and the cycloidal RV gear teeth, resulting in multiple groups of RV gear teeth meshing with the needle roller at the same time, so as to improve the load capacity. Since the number of RV teeth is 1 less than that of the needle roller, when the eccentric shaft rotates for one cycle, if the case is fixed, the RV gear rotates one tooth in the same direction as the input shaft.
The output end can be a shaft or a case. If the housing is fixed, the transmission shaft is output and the output is in the same direction. If the drive shaft is fixed and the housing is output, the output direction is exactly the opposite. Different transmission ratios can be obtained by replacing fixed and output components.
Related Posts